給気温度制御とは?制御内容、メリットやデメリット、選定方法を紹介
keisou_master
計装マスター
空調設備の自動制御において、「PID制御」という言葉を聞いたことはありませんか? PID制御は、エアコンやビルの空調機器などで、昔から広く使われている代表的な制御方式です。
この記事では、空調設備を例にしながら、初心者にもわかりやすくPID制御の仕組みを解説していきます。
PID制御とは、以下の3つの要素で構成された自動制御方式です。
これらを組み合わせることで、制御対象(たとえば部屋の温度)を目標値に近づけ、安定させることができます。
PIDの説明をする前に、なぜPID制御が必要なのかを説明します。
自動制御の目的は測定値(PV)を設定値(SP)に一致させて、偏差(e)をゼロにすることです。
偏差(e) = 測定値(PV) – 設定値(SP)
PV:Present Value
SP:Set Point
ここでは、「室内温度(PV)をエアコンからの出力よって設定値(SP)と一致させる」ということを例にして考えます。
偏差(e)をゼロにするためには、室内温度(PV)が設定値(SP)よりも高ければエアコンをOFFにして、低ければONにして暖かい空気を送ればよいはずです。(暖房モード時と仮定)
このような動作をオンオフ動作といいます。
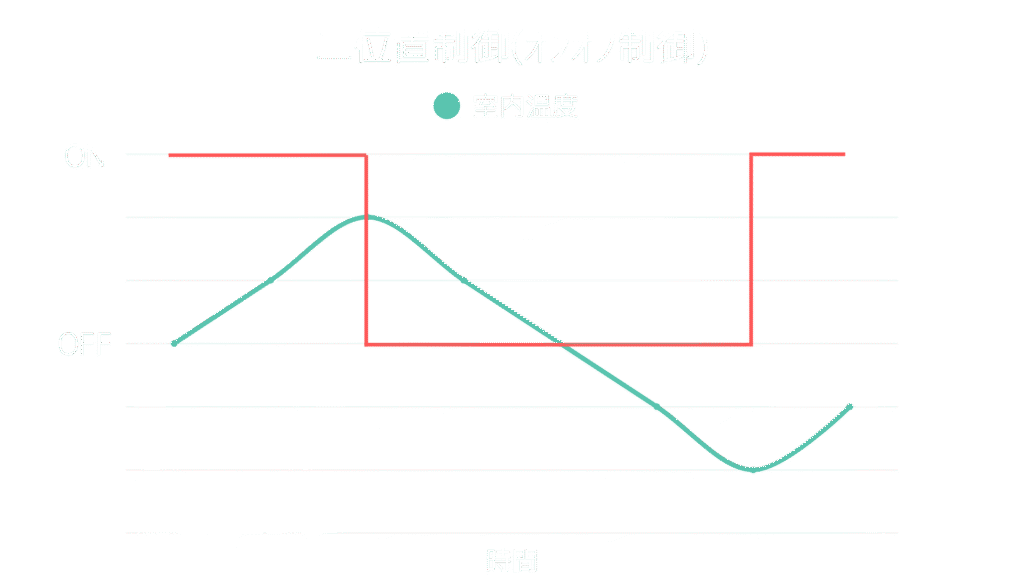
しかし、上図のようにオンオフ動作では室内温度が上下に振れてしまう、ハンチングが発生することがあります。
PID制御は、このような不安定な動きを抑えるために考え出された制御方式です。
PID制御の計算式は以下の通りに表すことができます。
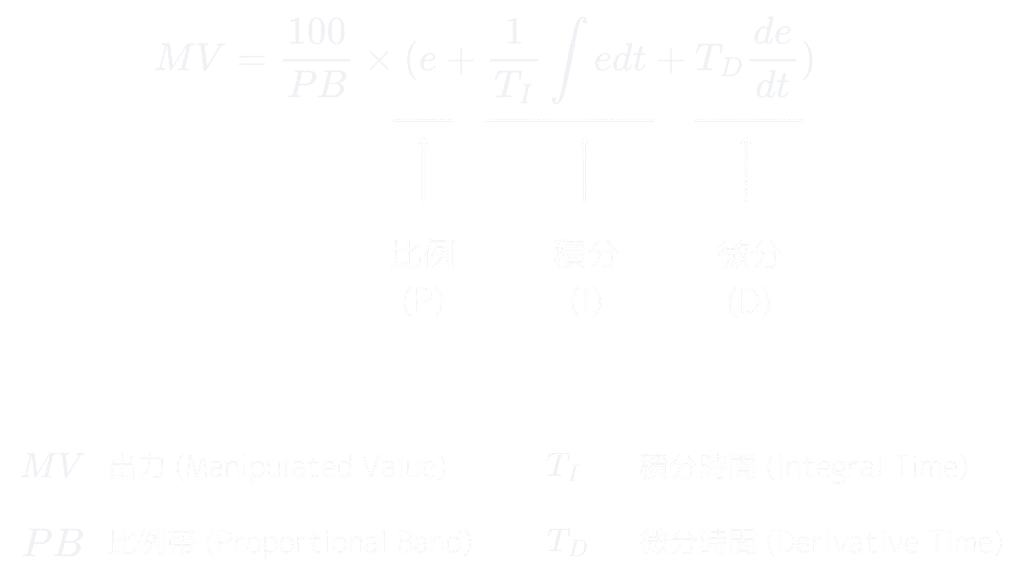
比例帯(PB)は出力のゲイン(計算結果をどれだけ出力に反映させるか)を表しています。
また、各項は比例、積分、微分の動作を表しており、それぞれに偏差(e)が含まれています。
つまり、偏差の大きさに応じて比例、積分、微分動作の計算を行い、それらを比例帯によって出力の大きさを調節したものが、最終的な出力になるということです。
では、各項(比例、積分、微分)はどのような動作となり、どのような特徴をもっているのでしょうか?
以下に詳しく解説していきます。
P制御とは、偏差(目標と現在の差)に比例して、出力を増減させる制御のことです。
たとえば「設定温度25℃に対して室内温度が28℃なら、冷房出力を強める」といった動作です。
二位置制御では、出力が全開か全閉の2つしかありませんでしたが、比例制御では偏差に応じて出力を0~100%まで細かく調整することができるので、ハンチングを防ぐことができます。
比例制御の動作図は次のようになります。
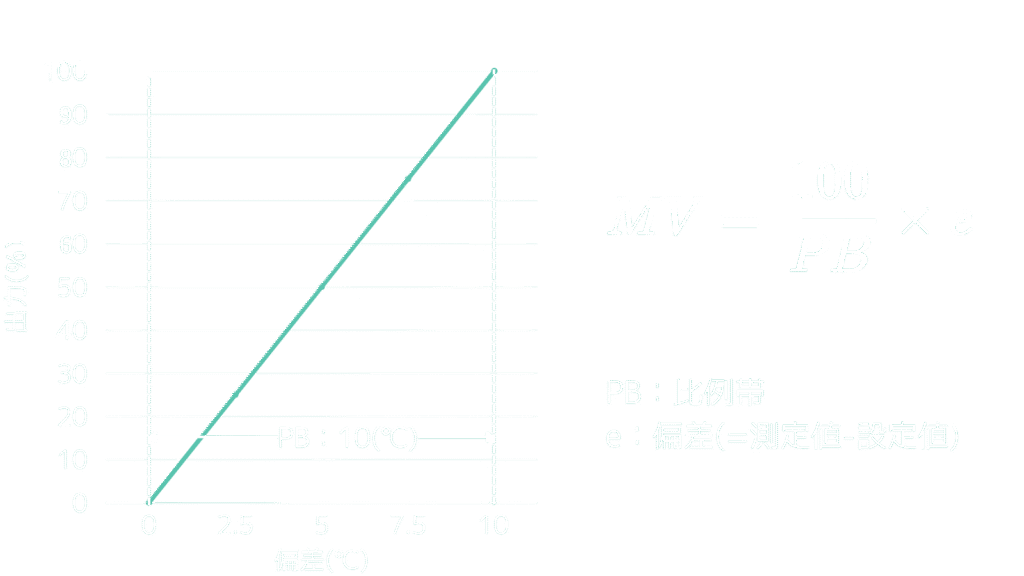
偏差が0℃の時は出力が0%、偏差が5℃の時は出力が50%と、偏差に対して出力が比例しているのがわかると思います。
比例帯(PB)は出力のゲイン(どれだけ出力に反映させるか)を表しています。
上図では例として比例帯(PB)を10℃としています。
したがって、偏差が0~10℃の間で、出力が0~100%となります。
では、比例帯を狭くした場合はどうなるのかというと、偏差に対して出力変化が大きくなる(感度が良くなる)ため、ハンチングが起きやすくなります。
逆に、比例帯を大きくすれば、偏差に対して出力変化が小さくなる(感度が悪くなる)ため、制御性が悪くなってしまいます。
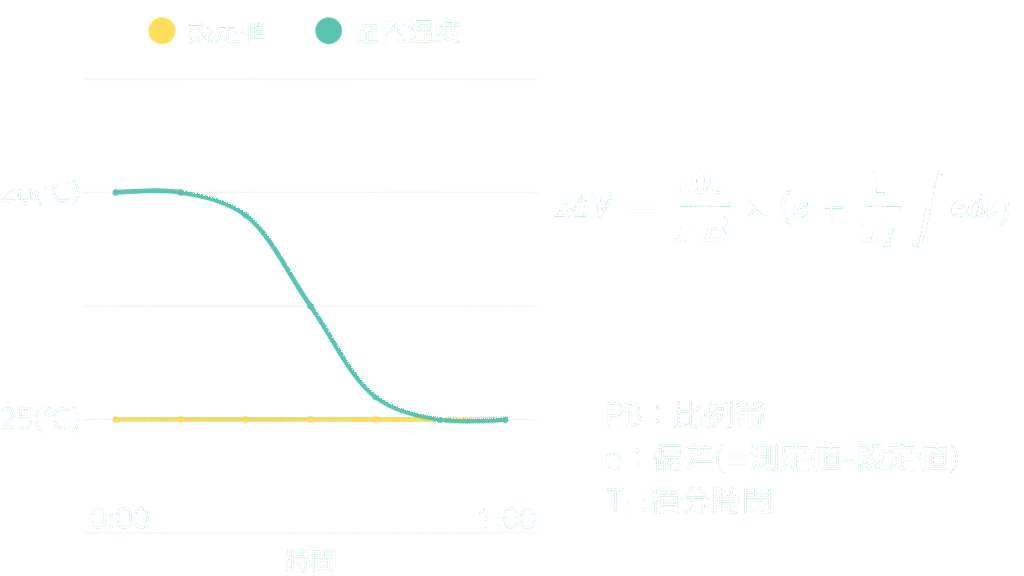
また、仮に適切な比例帯を見つけることができたとしても、比例制御にはオフセット(測定値と設定値のずれ)が残ってしまうという欠点があります。
オフセットができてしまう理由を一言でいうと、偏差に比例するP制御の出力が安定状態を保ってしまうからです。
なぜP制御の出力が安定状態を保ってしまうのでしょうか。
原因は様々ですが、ここでは例として、室内負荷による温度上昇を挙げます。
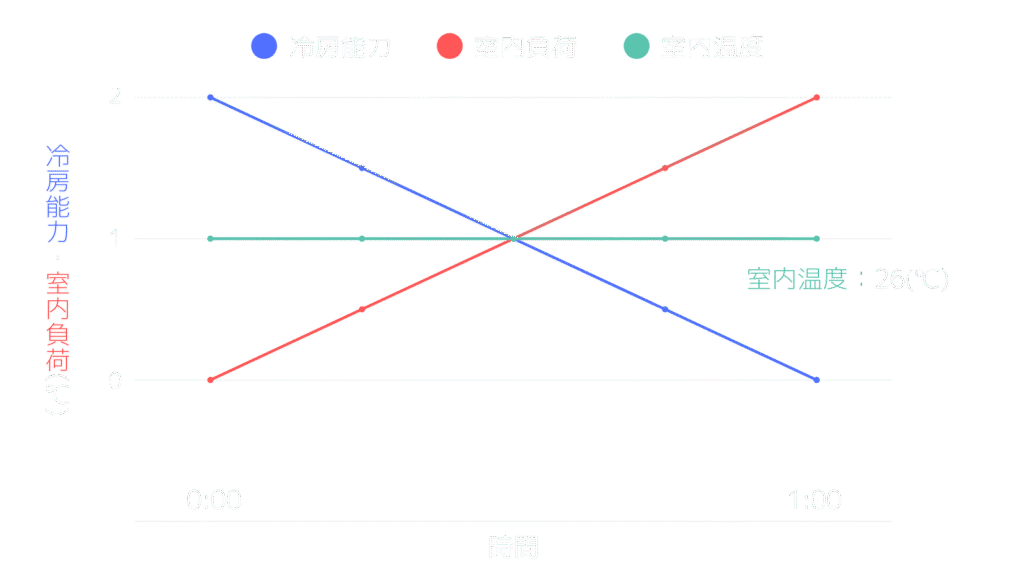
上図では、1時間当たりの冷房能力によって2℃室内温度が下がるのに対し、室内負荷によって2℃室内温度が上がるため、室内温度が変化していない様子を表しています。
室内負荷とは、人体より発生する熱、照明器具より発生する熱、PCや湯沸かし器等の室内設備機器より発生する熱など、室内で発生する熱負荷のことです。
(熱負荷とは、室内を快適な環境に保とうとする際に、邪魔になる熱)
室内温度が変化しないということは、偏差(室内温度-設定値)も変化しないということです。
P動作の出力は偏差に比例するため、偏差が変化しないということは、冷房出力も変化しません。
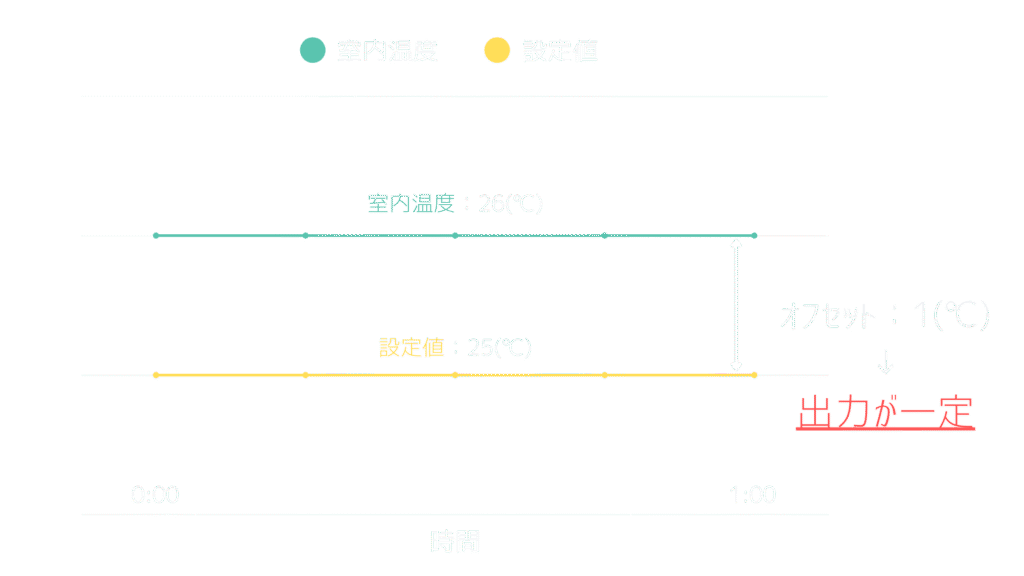
そのため、P動作としては正しい動作をしているのにも関わらず、偏差が1℃残ってしまっています。
このような理由により、安定状態で残ってしまう偏差のことをオフセットといいます。
このオフセットをP動作のみで取り除くには、設定値を変える必要があります。
しかしオフセットが生じる原因は様々で、人間がその度に設定値を変更するのは面倒です。
そこで、このオフセットを自動的に修正できる方法として、I(積分)制御が登場しました。
I制御とは、偏差を蓄積して、P制御では残ったオフセットを時間とともに補正していく制御です。
I制御の動作図は次のようになります。
P制御では1℃のオフセットができてしまいましたが、I制御を取り入れることで1℃の偏差が出力に加算され、最終的に偏差が0になる方向に補正することができます。
ここで重要な点は、P制御では偏差が0になるとP制御出力も0になりますが、I制御では偏差が0になってもI制御出力は保持され続けるということです。
これによって常にオフセットを補正しながら制御出力を安定させることができます。
積分時間(TI)とは、I制御出力=P制御出力となるまでの時間と定義されます。
例えば、積分時間が300秒だとすると、300秒後(I制御出力が300回積み重なった後)にP制御出力とI制御出力が等しくなるのが、上式からもわかると思います。
より簡単に言い換えると、I制御出力のゲイン(どれだけ制御出力に反映させるか)が積分時間です。
積分時間は上式の通り、逆数になっているため、積分時間が長いほどI制御出力は小さくなり、積分時間が短いほどI制御出力は大きくなります。
そのため、積分時間が長いほど測定値は設定値にゆっくりと近づく動作になり、積分時間が短いほど測定値は設定値にすばやく近づく動作になります。
しかし、積分時間が短すぎるとハンチングが発生する原因となるため、現場に合わせた調整が必要不可欠になります。
さて、これまでPI制御の仕組みについて解説してきましたが、PI制御のみでも偏差をゼロにするという自動制御の目的は達成できそうです。
しかし、PI制御のみでは測定値の急激な変化に対応できないという弱点があります。
例えば、いつも閉まっているはずの窓が開きっぱなしになっていたり、部屋の中にいる人数が急に増えたりなど、部屋の温度が急激に変化してしまった場合、PI制御のみでは偏差を0にするのに時間がかかってしまいます。
そこで考え出されたのがD制御です。
D制御は、偏差の変化する速度に反応して、急激な変化があれば即座に出力を調整する制御です。
D制御の動作図は次のようになります。
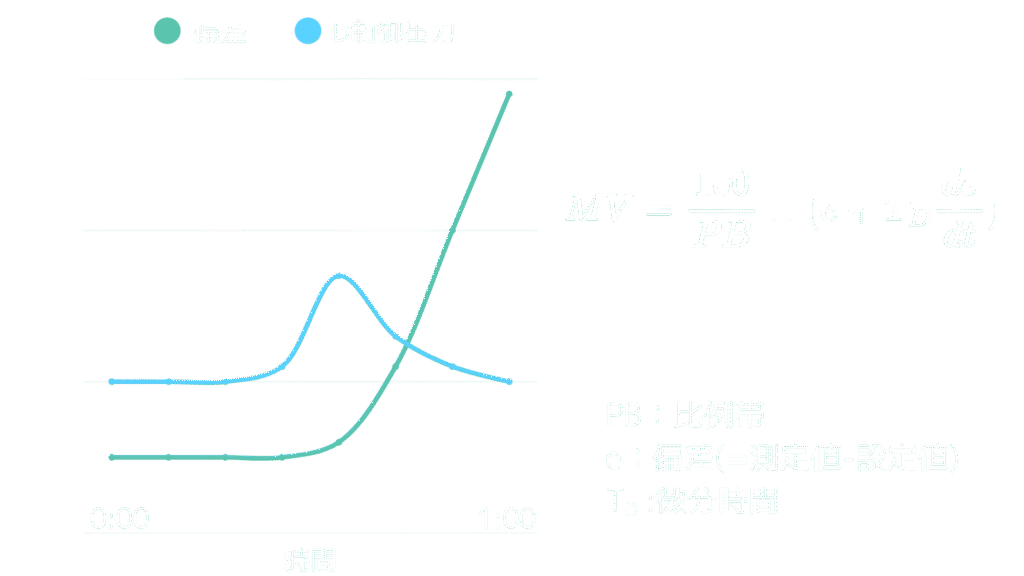
D制御の特徴は、PI制御のように偏差の大きさに対応するのではなく、偏差の変化する速度に対応していることです。
上図のように、偏差が一定の時はD制御出力も一定であり、また偏差の変化量が一定の時もD制御出力は一定となります。
一方、偏差が急激に増加したタイミングでD制御出力は増加して、急激な偏差の変化に対応できるように動作しているのがわかると思います。
微分時間(TD)は長いほど出力MVに対する影響が大きく、短いほどが小さくなります。
積分時間(TI)と異なるのは、逆数になっているかどうかで、D制御出力のゲイン(どれだけ制御出力に反映させるか)に相当しているということは同じです。
また、微分時間(TD)も積分時間(TI)と同様に、長すぎても短すぎてもハンチングや、追従性の悪さにつながるため、現場に合わせた調整が必要になります。
PID制御の仕組みを理解することはもちろん重要ですが、実際はPID制御のパラメータ(比例帯PB、積分時間TI、微分時間TD)の調整がPID制御の最も大切な部分です。
例えば、急激な温度変化がない部屋や、シビアな室温の追従性が求められていないオフィスビルなどでは、微分時間TDを0にして、PI制御のみを採用する場合もあります。
まさに、現場に合わせたPID制御のパラメータ調整こそが、適切な制御になっているかどうかを分ける、腕の見せ所です。
こちらについては別の記事で解説したいと思います。
ぜひこの記事をきっかけに、PID制御のイメージができるようになればうれしいです。